
Temporal Difference Models: Deep Model-free RL for Model-based
5 450
30.3
Microsoft Research336 тыс
Следующее
 20.04.18 – 1 52621:28
20.04.18 – 1 52621:28Популярные
 24 дня – 1 4084:06
24 дня – 1 4084:06 12.12.22 – 63528:53
12.12.22 – 63528:53Опубликовано 20 апреля 2018, 22:29
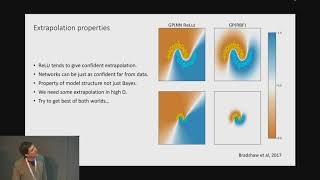
Deep reinforcement learning (RL) has shown promising results for learning complex sequential decision-making behaviors in various environments. However, most successes have been exclusively in simulation, and results in real-world applications such as robotics are limited, largely due to poor sample efficiency of typical deep RL algorithms. I will introduce temporal difference models (TDMs), an extension of goal-conditioned value functions that enables multi time resolution model-base planning. TDMs generalize traditional predictive models, bridge the gap between model-based and off-policy model-free RL, and show substantial improvements in sample efficiency without introducing asymptotic performance loss.
See more at microsoft.com/en-us/research/v...
See more at microsoft.com/en-us/research/v...
Свежие видео

 3 дня – 42 16441:51
3 дня – 42 16441:51
 7 дней – 201 4970:18
7 дней – 201 4970:18
 7 дней – 18 9590:42
7 дней – 18 9590:42
 7 дней – 5430:26
7 дней – 5430:26
 8 дней – 7264:40
8 дней – 7264:40
 12 дней – 141 14419:36
12 дней – 141 14419:36Случайные видео

 232 дня – 335 9908:01
232 дня – 335 9908:01
 235 дней – 4 8510:16
235 дней – 4 8510:16 15.11.23 – 3832:17
15.11.23 – 3832:17
 26.07.23 – 101 4959:22
26.07.23 – 101 4959:22
 12.12.22 – 76 0236:07
12.12.22 – 76 0236:07
 08.10.16 – 568 0855:38
08.10.16 – 568 0855:38 2 дня – 298 94135:01
2 дня – 298 94135:01
 3 дня – 18 98040:04
3 дня – 18 98040:04
 14 дней – 5042:45
14 дней – 5042:45 15 дней – 77010:59
15 дней – 77010:59 15 дней – 34 71112:55
15 дней – 34 71112:55 16 дней – 1623:17
16 дней – 1623:17 17 дней – 1 606 25810:34
17 дней – 1 606 25810:34
 14 часов – 2 2081:01
14 часов – 2 2081:01